阿里巴巴旗下高德在具身智能领域迈出关键一步,其首款四足机器人即将亮相公众视野。这款硬件产品已确定于2026北京亦庄半程马拉松暨人形机器人半程马拉松期间完成首次公开演示,标志着高德在具身智能硬件领域的实质性突破。据内部人士透露,该机器人研发项目与高德同期推进的人形机器人计划同属战略级布局,未来将形成多形态产品矩阵。
支撑硬件落地的技术储备可追溯至今年初的重大组织调整。高德于1月正式成立具身智能专项部门,随后在2月连续发布两项核心模型:通用具身操作模型ABot-M0实现多形态机器人统一控制,全栈导航基础模型ABot-N0则突破复杂环境感知瓶颈。技术团队采用模块化架构设计,使两个模型既能独立运行又可协同优化,这种创新方案在后续国际测评中展现出显著优势。
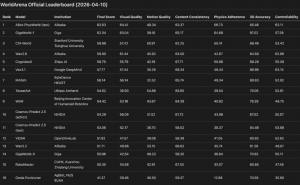
在算法竞技场,高德自研的具身世界模型ABot-World近期连续登顶国际权威榜单。该模型在AGIbot World Challenge和World Arena两项测试中力压谷歌、英伟达等顶尖机构,其核心突破在于构建了动态环境模拟系统,使机器人具备更强的场景适应能力。开源社区同步迎来重要进展,ABot-M0模型代码已全面开放,开发者可通过单一接口控制不同构型机器人,这种设计理念在Libero测试集上获得验证,操作精度较传统方案提升37%。
导航领域同样传来捷报,ABot-N0模型在CityWalker等七项国际基准测试中刷新纪录。该模型通过融合多模态传感器数据,在动态障碍物规避、长距离路径规划等场景表现出色。技术白皮书显示,其定位误差控制在2厘米以内,决策响应速度达到毫秒级,这些特性为马拉松场景的复杂路况提供了技术保障。高德研发团队表示,正在将导航模型与操作模型进行深度耦合,未来机器人将实现"感知-决策-执行"的全链路自主化。
针对市场关注的产品发布节奏,高德官方确认首款四足机器人已完成工程样机验证,正在进行最后的可靠性测试。该产品定位为多功能服务平台,可适配安防巡检、物流配送等场景。值得关注的是,高德并未将研发视野局限于四足形态,其产品路线图明确包含人形机器人开发计划,这种双线并进策略在业内尚属首次。随着发布日期临近,业界对高德如何平衡技术先进性与商业落地充满期待。